
What is the difference between AHRS and IMU?
Attitude and Heading Reference System, Inertial measurement unit
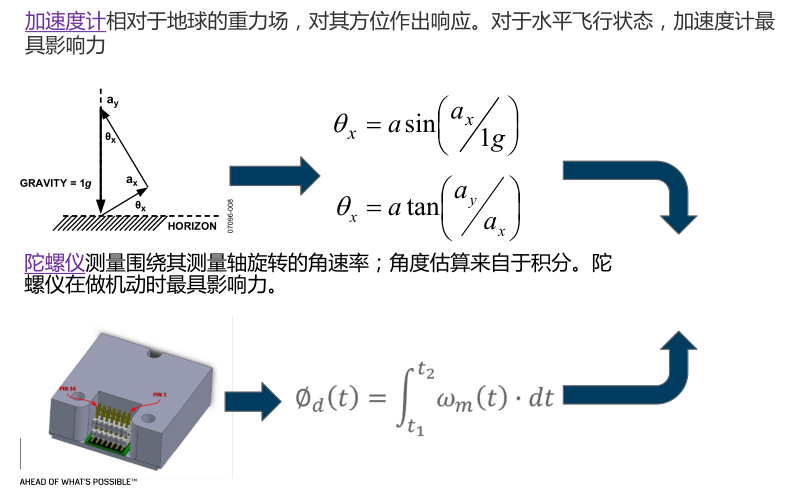
AHRS is commonly known as Attitude and Heading Reference System. AHRS is composed of an accelerometer, a magnetic field meter, and a gyroscope. The true reference of AHRS comes from the earth’s gravity field and the earth’s magnetic field measurement accuracy, and the gyro determines his dynamic performance. AHRS cannot work without Earth’s gravity and magnetic fields. Moreover, the more orthogonal the magnetic and gravitational fields, the better the attitude and attitude measurement. That is to say, if the magnetic field and the gravity field are parallel, for example, in the geomagnetic north and south poles, the magnetic field here and the gravity field are in the same direction. At this time, the route crossing cannot be measured. This is the flaw of the attitude and attitude system. At high latitudes, the line angle error will become larger and larger.
The university theoretical mechanics tells us that all motions can be decomposed into a linear motion and a rotational motion, so this inertial measurement unit measures these two types of motion, linear motion can be measured by an accelerometer, and rotational motion can be measured by a gyroscope. Assuming that the IMU’s gyroscope and accelerometer are measured without any error, then the gyroscope can accurately measure the attitude of the object. Accelerometers can be used to integrate the displacements to achieve a complete 6DOF, which means that the current attitude and relative displacement of the object can be known based on the IMU, and is not limited to any field.

In fact, AHRS has one more magnetic field sensor than IMU. Why is the level of AHRS lower than IMU and it depends on gravity and magnetic field? This is determined by the sensor device architecture. AHRS sensors are usually low cost MEMS sensors. The noise of this kind of sensor’s gyroscope and accelerometer is relatively large. Take the planar gyroscope as an example, the integration of ADI’s gyroscope will drift about 2 degrees in one minute. If there is no magnetic field and gravity field to correct the With the axis gyroscope, the actual attitude and measured output attitude of the object will be completely changed after 3 minutes. Therefore, the field vector must be used for correction under the architecture of this low-cost gyroscope and accelerometer.
IMU is actually the same. Because we know that there are no absolutely accurate sensors, only relatively accurate sensors. IMUs use fiber optic gyroscopes or mechanical gyroscopes and accelerometer. This type of gyroscope with high cost. The accuracy is also relatively high compared to the MEMS gyroscope. High accuracy does not mean accuracy. The attitude accuracy parameter of the IMU is usually how many degrees an hour drifts.
The biggest difference between AHRS and IMU is that IMU is a measurement relative to the ideal attitude or relative attitude, and AHRS is a attitude measurement relative to the ground level. In the universe, there is no fixed counterpart for attitude reference. The measurement attitude using IMU can only be measured and described relative to the initial attitude or ideal attitude of the aircraft. AHRS is relative to the geoid and perpendicular to the level The gravity vertical line is used to measure and describe the attitude of the measured object, so the error is high in high latitudes. In short, I think that AHRS should be a special application of IMU and a subset of IMU applications.
For more information, please contact info@sennavs.com