
How to use gyroscope and accelerometer to built inertial navigation system?
Inertial navigation system: Using inertial components such as accelerometer and gyroscope on the carrier to measure the angular motion information and line motion information of the aircraft with respect to the inertial space, and calculate the aircraft’s autonomous navigation methods for navigation parameters such as attitude, heading, speed, and position. The devices that make up the inertial navigation system are all installed in the carrier body, do not rely on external information, do not radiate energy to the outside world, and are not susceptible to interference. It is an autonomous navigation system.
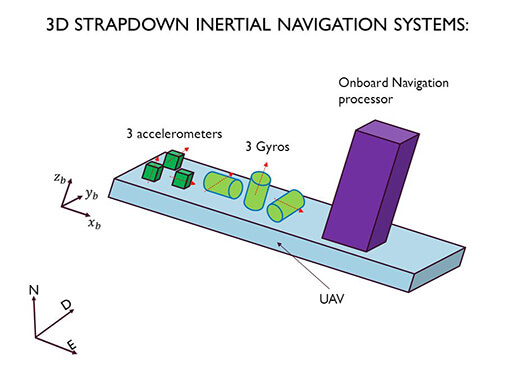
Inertial navigation systems are generally composed of inertial measurement devices, computers, and control displays. Inertial measurement devices include accelerometers and gyroscopes, also known as inertial navigation combinations:
1.3-DOF gyroscope used to measure three rolling motions of an aircraft;
2. 3 accelerometers are used to measure the aircraft three translational accelerations;
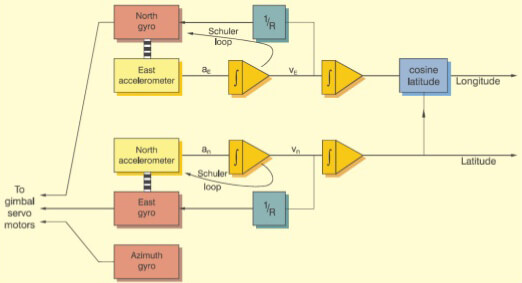
3. The computer calculates speed and azimuth data of aircraft based on measured acceleration signals, and controls the display to display various navigation parameters.
Modern high-precision inertial navigation systems impose high requirements on gyroscopes and accelerometers, because the drift error of gyroscope and the zero offset of accelerometer are the most direct and important factors affecting accuracy of inertial navigation system. The factors, therefore, how to improve the performance of inertial devices and improve the measurement accuracy of inertial components, especially gyroscope’s measurement accuracy, has been the focus of inertial navigation research.
Strap-down Inertial Navigation System (SINS) is accelerometer and gyroscope that is directly mounted on a carrier. Usually adopt quartz accelerometers and fiber optic gyroscope to built SINS. The attitude matrix is calculated in real time in the computer, such as, the carrier coordinate system and the navigation coordinate system are calculated. The relationship between accelerometer information of carrier coordinate system is converted into information in navigation coordinate system, and then the navigation calculation is performed. Due to its advantages of high reliability, strong functions, light weight, low cost, high accuracy, and flexible use, SINS has become the mainstream of inertial navigation systems today. The Inertial Measurement Unit (IMU) is the core component of inertial navigation system. The accuracy of output information of IMU determines the system accuracy to a large extent.
For more information, please contact info@sennavs.com